Our most recent project funded by FFBI has been a great success!
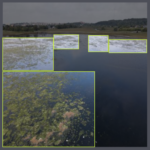
The project has made it possible for BrainBotics to create and train a Machine Learning algorithm that can reliably and automatically detect eelgrass floating in water, and is in itself a huge step towards the goal of collecting eelgrass in water for use as a green and sustainable raw material that can for example substitute plastics and certain building materials. […]